 Die Campus App der Bergischen Universität Wuppertal hat seit Version 1.0 bereits ein „Campus Navi“ integriert. Mittels GPS lokalisiert sie auf Wunsch die User und zeigt ihnen per augmented Reality die Richtung zum gesuchten Raum an.
Die Campus App der Bergischen Universität Wuppertal hat seit Version 1.0 bereits ein „Campus Navi“ integriert. Mittels GPS lokalisiert sie auf Wunsch die User und zeigt ihnen per augmented Reality die Richtung zum gesuchten Raum an.
Innerhalb von Gebäuden ist aber nur selten auf GPS-Signale Verlass. Genau hier wäre allerdings eine Navigationsfunktion durchaus nützlich zu realisieren. Ortsunkundige fänden sich besser in den verwinkelten Gebäudetrakten insbesondere am Campus Grifflenberg zurecht, aber auch Menschen, die erheblich in ihrer Bewegungsfreiheit eingeschränkt sind, können von einer individuell konfigurierbaren Indoornavigation profitieren: Für sie wäre es leicht möglich, barrierefreie Routen zwischen zwei Punkten auf dem Campus zu finden. Auch Menschen mit Sehbehinderungen könnten z.B. durch eine akustische Wegeleitung eine erhebliche Erleichterung im Uni-Alltag erfahren.
Dazu ist zunächst die Lokalisierung der navigierenden Person vonnöten. Dafür lassen sich bereits unterschiedlichste Ansätze finden, bspw. per Schall-Triangulierung, Video Light Communication oder Magnetfeld-Fingerprinting.
Eine vielversprechende Methode könnte allerdings auch die Ortung mittels Bluetooth-Beacons sein. Diese senden in regelmäßigen Abständen Signale aus, aus denen über die empfangenen Signalstärke (RSSI) ermittelt werden kann, wie groß die Entfernung zu einem dieser Beacons ist. Nach ersten Tests scheint dies besonders gut auf kurze Distanzen zu funktionieren, da die Signalstärke logarithmisch zur Entfernung fällt, d.h. in den ersten Metern besonders stark und anschließend nur noch moderat.
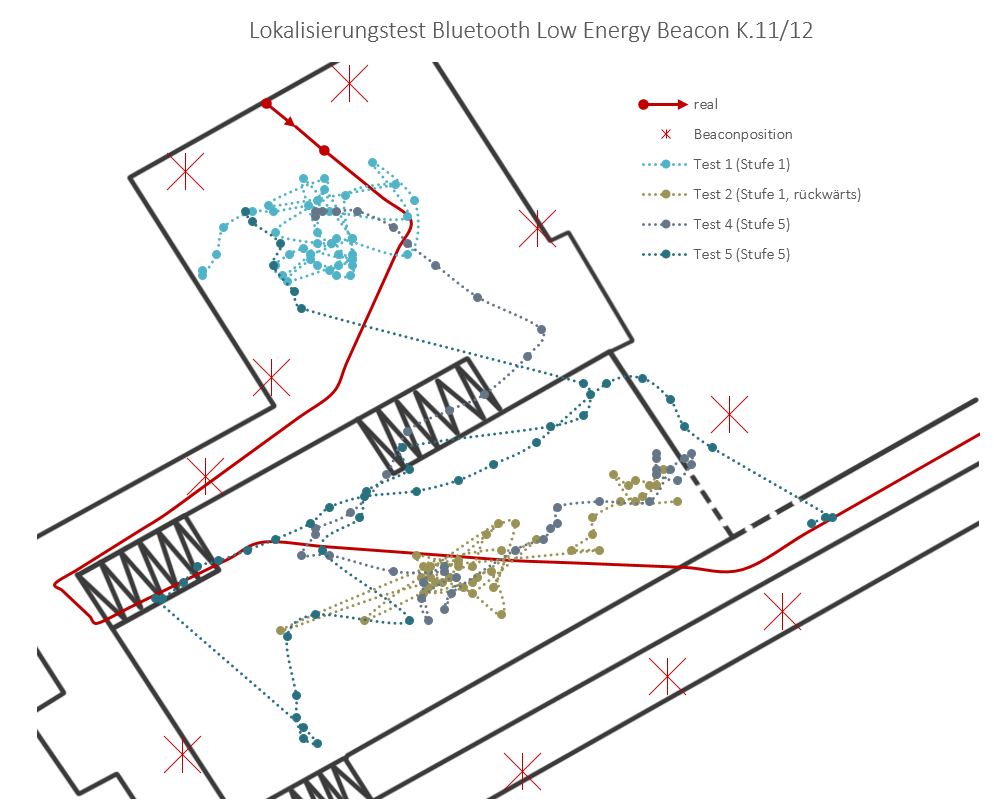
Dies bedeutet, dass bei einer Nutzung von Bluetooth-Beacons insbesondere kurze Entfernungen, d.h. kleine Abstände für eine gute Signalstärkeninterpretation wichtig sind und sich zudem Korridore (wie auf T.11) scheinbar besser für die Signalwiedererkennung eignen als offene Räume (wie K.11/12).
![]()
Daraufhin haben wir einige „Live-Tests“ mithilfe der Android-API des kommerziellen Anbieters Nimble Devices Oy durchgeführt, um zu testen, inwieweit durch Abgleich von Lageplänen und den empfangenen Signalen installierter Beacons die Position einer sich bewegenden Person ermittelt werden kann.
Ein erster Test in Gebäude K.11/12 bestätigt dies: durch die große Entfernungen der Beacons zueinander ist es bei niedriger Sendeleistung nicht und bei hoher Sendeleistung auch nur sehr schlecht möglich, einen real abgeschrittenen Pfad nachzuvollziehen.
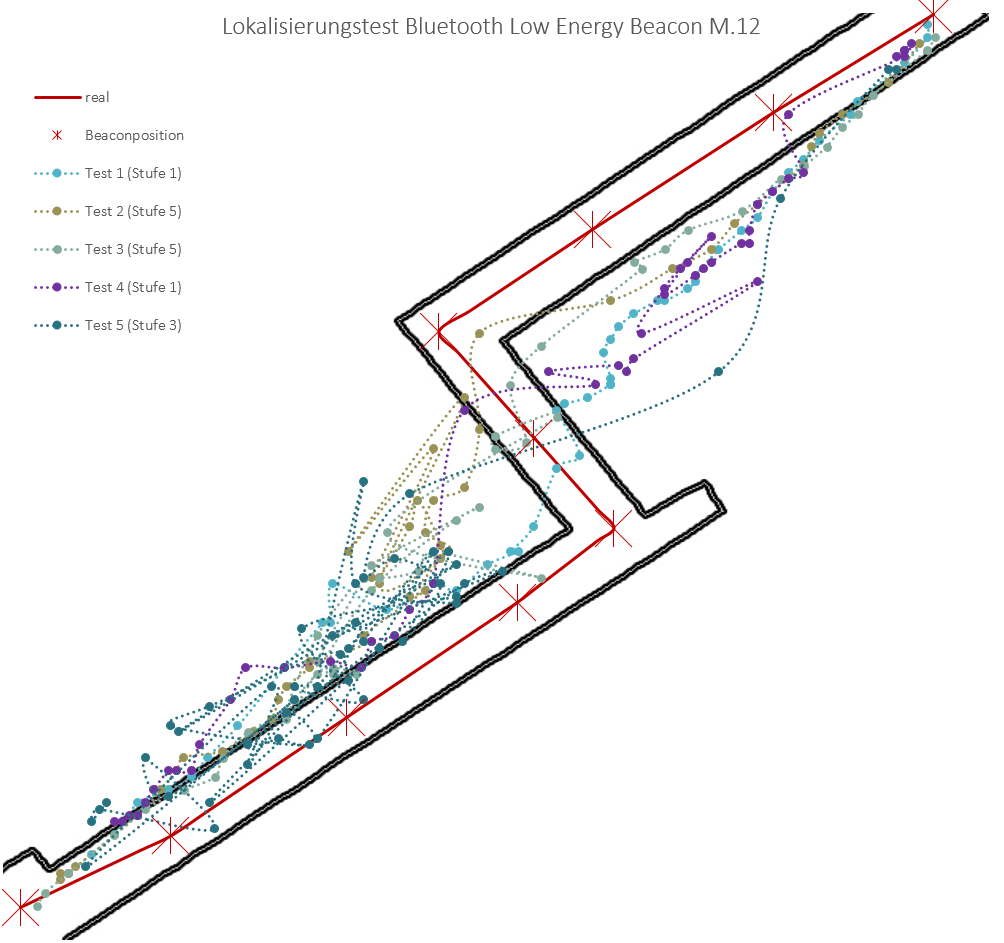
Bessere Ergebnisse lassen sich auf dem Korridor von Gebäude M.12 erzielen. Bei diesem Versuchsaufbau liegen die Beacons nur wenige Meter auseinander und sind zudem gradlinig angeordnet. Wie zu erkennen ist, kann auf allen Sendestufen zumindest grob die Bewegung nachvollzogen werden, mit mittleren Fehlern von 20m bzw. 10m liegen Stufe 1 bzw. Stufe 3 der Sendeleistungseinstellungen jedoch weit hinter Stufe 5 mit 3,5m mittlerem Fehler.
Um eine möglichst genau Indoornavigation zu ermöglichen, muss die Genauigkeit jedoch noch weiter verbessert werden. Eine Möglichkeit ist hier, durchgängig eine Fehlerkorrektur anzuwenden. Wie oben zu sehen, weichen die geschätzten Positionen oft in einen Bereich ab, der von der navigierenden Person gar nicht betreten werden kann, da sich diese Position z.B. wie hier in der Testumgebung außerhalb des Korridors befindet. Genau diesen Umstand sollte man nun noch berücksichtigen und versuchen, die in unzugängliche Areale abweichenden Positionen auf die zugänglichen zu korrigieren bzw. zu filtern.
Eben dies wurde in einem Test in Gebäude T.11 durchgeführt: Die ganze Fläche der Etage T.11 wurde in der Software durch das Hinzufügen von unzugänglichen Arealen auf genau eben den betretbaren Korridor von Gebäude T.11 reduziert. Dadurch ist bei jeder getesteten Sendeleistung der mittlere Fehler auf unter 3,5m gefallen, bei höchster Sendeleistung liegt er sogar nur bei ca. 1,3m.

Fazit: Für eine Indoornavigation bieten Bluetooth-Beacons ein hohes Potential, um in der Positionierung eingesetzt zu werden. Es sollte darauf geachtet werden, dass für die hier eingesetzte Triangulation eine möglichst hohe Sendeleistung gewählt wird. Zudem ist eine enge Rasterung des Areals notwendig. Korridore scheinen für die Positionierung besser geeignet zu sein und, ebenso wie die Filterung von unzugänglichen Arealen zur Fehlerkorrektur.
Erste Anwendungsbeispiele, in denen Bluetooth-Beacons für die Indoorpositionierung eingesetzt werde, gibt es bereits.